
Барраси
Асбоби мошини CNC ин татбиқи маҷмӯии технологияҳои механикӣ, электрикӣ, гидравликӣ, пневматикӣ, микроэлектроника ва иттилоот ва дигар технологияҳо ҳамчун яке аз маҳсулоти ҳамгироии электромеханикӣ дар таҷҳизоти истеҳсоли механикӣ бо фасеҳ, универсалӣ, дақиқ, баландсифат мебошад. самаранокии "фасеҳ" таҷҳизоти истеҳсолии автоматӣ, он амалиётҳо ва қадамҳои гуногуни зарурӣ ва шакл ва андозаи кор бо рамзи рақамиро коркард хоҳад кард, Тавассути муҳити идоракунӣ ба дастгоҳи назорати рақамӣ, дастгоҳи назорати рақамӣ ба маълумоти воридотӣ кор карда баромадан ва хисоб кардан, системам идоракунии командам асбобхои дастгох ва узелхои двигатель, автоматй кор карда баромадани киемхои корие. Дарачаи техникии дастгоххои CNC ва фоизи он дар истехсоли махсулот ва моликияти умумии дастгоххои металлбури яке аз нишондихандахои мухими чен кардани дарачаи умумии тараккиёти иктисодиёти миллй ва истехсоли саноатии мамлакат мебошад. Дар солҳои охир, ҳиссаи асбобҳои CNC дар корхонаҳои Чин сол аз сол афзоиш ёфта, он дар корхонаҳои калон ва миёна бештар истифода мешавад ва он инчунин дар корхонаҳои хурду миёна ва ҳатто дар корхонаҳои хурд ва миёна истифода мешавад. корхонахои алохида.
Талаботи раванди CNClathe
- Ҳангоме ки порчаи корӣ аз ҷониби токарии CNC коркард мешавад, миқдори ғизо калон аст, суръати коркард паст аст ва раванди коркард аз сабаби нобаробар будани сатҳи порчаи корӣ бори таъсирбахш дорад.
- Токарй, микдори хуроки кам аст, бо максади таъмин намудани самаранокии коркард, суръати коркарди он баланд аст.
- Муҳаррики шпиндель бояд суръати паст ва баромади моменти баланд дошта бошад ва устувор аст ва метавонад бо суръати баланд кор кунад.
- Қабули сигналҳои аналогӣ хатти баланд ва дахолати ками сарбориро талаб мекунад.
- Садои мотор хурд аст ва дахолат ба таҷҳизоти автоматикунонии система хурд аст. Суръатро то ҳадди имкон кам кунед.
Афзалиятҳои маҳсулоти силсилаи CNClathe KD600
Силсилаи Kd600 инвертери вектории баландсифат технологияи пешрафтаи назорати флюсро қабул мекунад, моменти мотор дар суръати паст калон аст, дақиқии суръат баланд аст, нарх оқилона аст, функсия пурра аст, бо коркарди фаврии нокомии барқ ва пайгирии суръат ва аз нав оғоз кардани функсия. , барои таъмини он, ки система барои ноил шудан ба механизми кори муттасил, таъмин кардани он, ки муҳаррик дар ҳолати баландтарин самаранок кор кунад, аз ин рӯ, Истифодаи инвертери вектории сермахсули силсилаи KD600 ба ҷои системаи AC servo шпиндель беҳтарин интихоб барои саноати асбобсозӣ мебошад. Инвертер силсилаи KD600 дорои хусусиятҳои зерин аст:
- Технологияи нодири назорати магнитӣ: метавонад назорати хуби муҳаррики моменти басомади паст бошад, метавонад дар 0 ~ 600 Гц кор кунад.
- Суръати қатъи устувор: Технологияи боздоштани ҷараёнҳои магнитӣ метавонад муҳаррикро суст ва дар муддати кӯтоҳтар боздорад.
- Дақиқии суръат ва устуворӣ: хатти танзими суръат хуб аст, дақиқии устувории суръат баланд аст ва тағирёбии суръат ҳангоми тағирёбии сарборӣ дар ҳудуди 5/1000 аст.
- Иҷрои аъло басомади паст: Алгоритми идоракунии вектори бе PG оптимизатсияшуда, басомади пасти 1 Гц то 150% баромади моменти номиналӣ, барои таъмини қувваи буриши қавӣ ҳангоми коркарди хол.
- Усулҳои вуруди басомадҳои сершуморро таъмин кунед: 2 манбаи шиддат аз 0 ~ 10V ё -10V то +10V, 1 манбаи ҷорӣ 4~20mA ё 0~20mA вуруд.
- Доираи васеи татбиқи шиддати шабака: Тарҳрезии пешрафтаи интиқоли барқро метавон дар муҳитҳои гуногуни шабака истифода бурд.
- Раванди аҷиби истеҳсолӣ: раванди беназири ғафсшавии рӯйпӯшро қабул кунед, канали ҳавоӣ аз PCB дохилӣ комилан ҷудо карда шудааст ва ба муҳити сахти ҷисмонӣ ба монанди чанги металлӣ, гази зангзананда ва намӣ мутобиқати қавӣ дорад.
- Схемаи азхудкунии ихроҷи дарунсохт зарбаи барқро ба бадани инсон ҳангоми пур кардани корпуси таҷҳизот хеле кам мекунад.
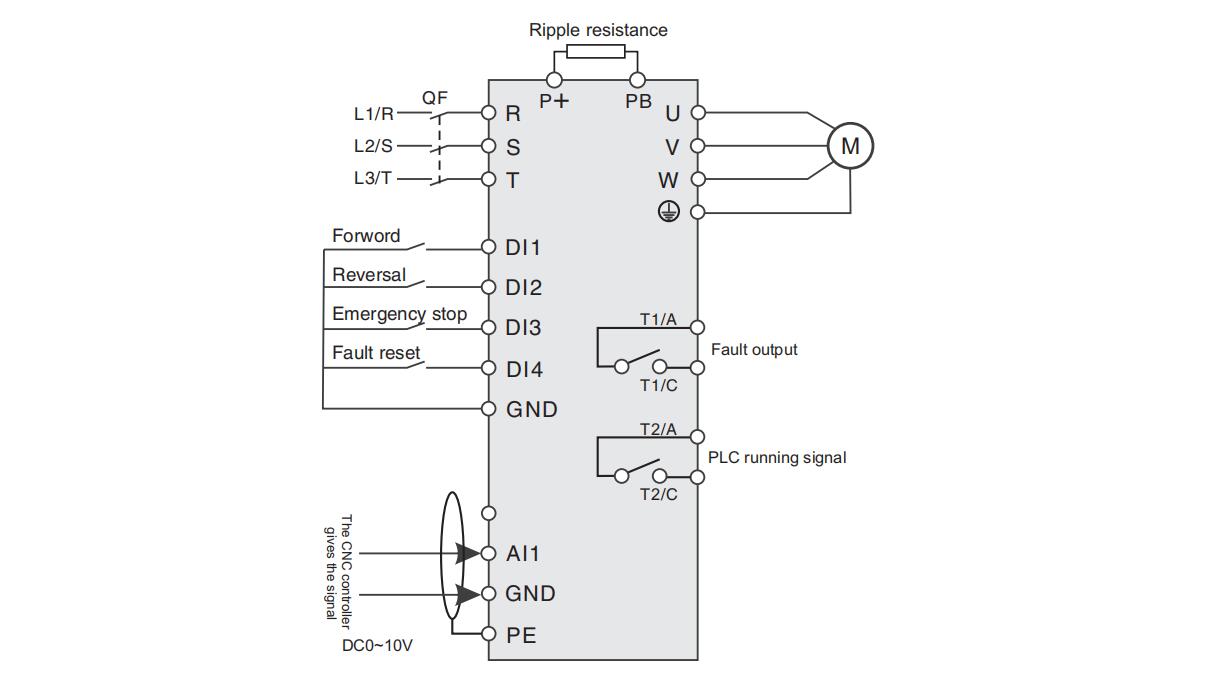
Диаграммаи пайвасти асосӣ
Танзимоти параметрҳо ва тавсиф
| Танзими параметр | Дастурҳо | Танзими параметр | Дастурҳо |
| P0-03=1 | Ҳолати вектории PG нест | П4-01=11КВт | Қувваи номиналии мотор |
| P0-04=1 | Терминали беруна оғоз ё қатъ мешавад | П4-02=380В | Шиддати номиналии мотор |
| P0-06=2 | Миқдори аналогии AI1 дода шудааст | П4-04=22,6А | Ҷараёни номиналии мотор |
| P0-14=150 | Басомади максималии баромад | P4-05=50Гц | Басомади номиналии мотор |
| P0-16=150 | Маҳдудияти басомади болоии корӣ | P1-06 = 1435 RPM | Суръати номиналии мотор |
| P0-23=1,0 | Вақти суръатбахшӣ | P6-00=2 | Натиҷаи хато |
| P0-24=0,8 | Вақти сустшавӣ | P6-02=1 | Табдилдиҳандаи басомад дар кор аст |
| P5-00=1 | Давидан ба пеш | П5-01=2 | Давраи баръакс |
| Параметрҳои мотор P4-01 ~ P4-06 Лутфан дақиқ ворид кунед | |||
Натиҷаи ислоҳи хатогиҳо
Исбот шудааст, ки конвертери басомади вектории сермахсули силсилаи KD600 метавонад ба талаботи идоракунии шпиндельи асбоби дастӣ пурра ҷавобгӯ бошад. KD600 режими пешбари идоракунии вектори бе PG-ро қабул мекунад, ки метавонад 150% моменти ҳатто дар зери суръати паст (басомади паст) ба таври осон бароварда шавад, то эҳтиёҷоти коркарди қисмҳои гуногунро қонеъ гардонад ва сохтори анъанавии шпиндели подшипникро пурра иваз кунад. сохтор содда, паймон аст ва метавонад ба танзими воқеии беқадами суръат ноил шавад. Суръати ин шпиндель тавассути сигнали аналогии беруна идора карда мешавад, то басомади баромадро дар равандҳои гуногуни коркард (масалан, коркарди ноҳамвор, коркард ва ғайра) ба суръати гуногун ниёз дорад, дар айни замон, системаи назорати ададӣ метавонад сигналҳои гуногуни шиддати аналогиро ба сигналҳои аналогӣ барорад. инвертер барои ноил шудан ба суръати гуногун ва сигнали оғоз ва қатъ низ аз ҷониби системаи идоракунии ададӣ назорат карда мешавад, ки дараҷаи автоматикунониро беҳтар мекунад ва мӯҳлати хизмати асбобро дароз мекунад.

Вақти фиристодан: Ноябр-17-2023